PPP (with DnCNN) Image Deconvolution (ADMM Solver)¶
This example demonstrates the solution of an image deconvolution problem using the ADMM Plug-and-Play Priors (PPP) algorithm [51] with the DnCNN [59] denoiser.
[1]:
import numpy as np
from xdesign import Foam, discrete_phantom
import scico.numpy as snp
from scico import functional, linop, loss, metric, plot, random
from scico.optimize.admm import ADMM, LinearSubproblemSolver
from scico.util import device_info
plot.config_notebook_plotting()
Create a ground truth image.
[2]:
np.random.seed(1234)
N = 512 # image size
x_gt = discrete_phantom(Foam(size_range=[0.075, 0.0025], gap=1e-3, porosity=1), size=N)
x_gt = snp.array(x_gt) # convert to jax array
Set up forward operator and test signal consisting of blurred signal with additive Gaussian noise.
[3]:
n = 5 # convolution kernel size
σ = 20.0 / 255 # noise level
psf = snp.ones((n, n)) / (n * n)
A = linop.Convolve(h=psf, input_shape=x_gt.shape)
Ax = A(x_gt) # blurred image
noise, key = random.randn(Ax.shape)
y = Ax + σ * noise
Set up the problem to be solved. We want to minimize the functional
\[\mathrm{argmin}_{\mathbf{x}} \; (1/2) \| \mathbf{y} - A \mathbf{x}
\|_2^2 + R(\mathbf{x}) \;\]
where \(R(\cdot)\) is a pseudo-functional having the DnCNN denoiser as its proximal operator. The problem is solved via ADMM, using the standard variable splitting for problems of this form, which requires the use of conjugate gradient sub-iterations in the ADMM step that involves the data fidelity term.
[4]:
f = loss.SquaredL2Loss(y=y, A=A)
g = functional.DnCNN("17M")
C = linop.Identity(x_gt.shape)
Set up ADMM solver.
[5]:
ρ = 0.2 # ADMM penalty parameter
maxiter = 10 # number of ADMM iterations
solver = ADMM(
f=f,
g_list=[g],
C_list=[C],
rho_list=[ρ],
x0=A.T @ y,
maxiter=maxiter,
subproblem_solver=LinearSubproblemSolver(cg_kwargs={"tol": 1e-3, "maxiter": 30}),
itstat_options={"display": True},
)
Run the solver.
[6]:
print(f"Solving on {device_info()}\n")
x = solver.solve()
x = snp.clip(x, 0, 1)
hist = solver.itstat_object.history(transpose=True)
Solving on GPU (NVIDIA GeForce RTX 2080 Ti)
Iter Time Prml Rsdl Dual Rsdl CG It CG Res
------------------------------------------------------
0 2.82e+00 2.471e+01 3.087e+01 5 7.435e-04
1 3.11e+00 8.216e+00 1.630e+01 5 5.307e-04
2 3.31e+00 5.068e+00 1.023e+01 4 5.072e-04
3 3.51e+00 3.601e+00 6.929e+00 3 6.830e-04
4 3.71e+00 2.657e+00 4.912e+00 3 3.985e-04
5 3.91e+00 1.830e+00 3.516e+00 2 6.866e-04
6 4.11e+00 1.339e+00 2.726e+00 2 5.163e-04
7 4.31e+00 9.974e-01 2.161e+00 2 3.550e-04
8 4.51e+00 7.911e-01 1.766e+00 2 2.713e-04
9 4.71e+00 4.772e-01 1.160e+00 1 8.405e-04
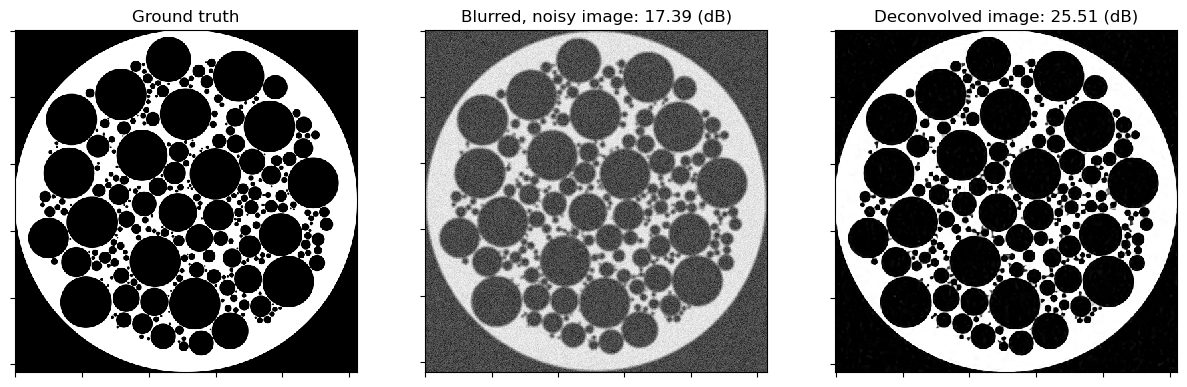
Show the recovered image.
[7]:
fig, ax = plot.subplots(nrows=1, ncols=3, figsize=(15, 5))
plot.imview(x_gt, title="Ground truth", fig=fig, ax=ax[0])
nc = n // 2
yc = snp.clip(y[nc:-nc, nc:-nc], 0, 1)
plot.imview(y, title="Blurred, noisy image: %.2f (dB)" % metric.psnr(x_gt, yc), fig=fig, ax=ax[1])
plot.imview(x, title="Deconvolved image: %.2f (dB)" % metric.psnr(x_gt, x), fig=fig, ax=ax[2])
fig.show()
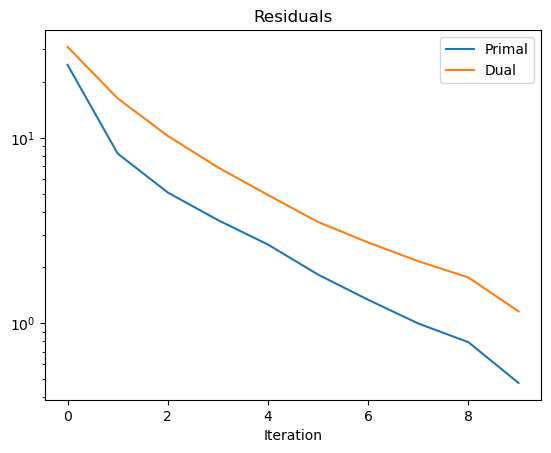
Plot convergence statistics.
[8]:
plot.plot(
snp.vstack((hist.Prml_Rsdl, hist.Dual_Rsdl)).T,
ptyp="semilogy",
title="Residuals",
xlbl="Iteration",
lgnd=("Primal", "Dual"),
)